沉浸式远航固定翼无人机系统-Part 1
4G LTE 超视距无人机飞行控制与图传系统可行性分析报告
1. 项目概述与可行性结论
1.1 项目背景
目标是利用4G LTE网络替代传统的2.4GHz/900MHz无线电链路,实现固定翼航模的超视距(BVLOS)控制、遥测数据回传(数传)、实时视频传输(图传),以及六轴动感座舱的姿态反馈。
1.2 可行性结论
结论:方案可行,属于“高算力、高集成度”的终极进阶玩法。
当前方案版本: 全沉浸式 4G FPV 系统(双链路控制 + 头追 + 六轴动感反馈)。
核心逻辑:
天空端: 手机主板处理视频与网络,ESP32 桥接飞控与 4G 网络。
控制链路: 4G + 2.4G 双余度控制。
视觉链路: 头部追踪控制云台 + 低延迟 SRT 图传。
体感链路(新增): 飞控解算高精度姿态 -> 4G 回传 -> 驱动地面六轴平台。
优势: 具备极高的沉浸感,不仅“看”得到,还能“感觉”到飞机的姿态变化。
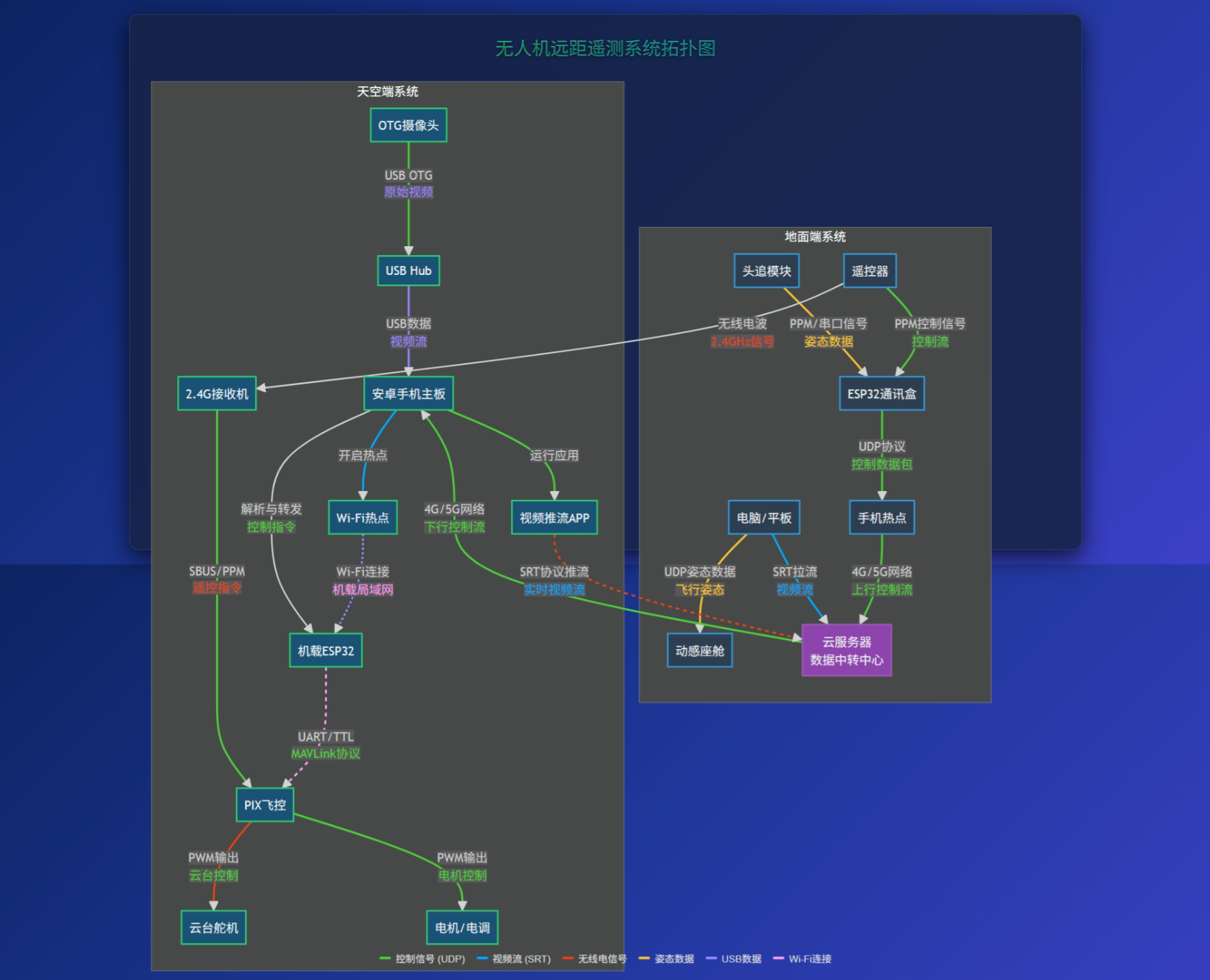
2. 系统架构设计(方案 C:安卓主板版)
2.1 硬件连接拓扑图
2.2 核心数据流(三发一收)
上行控制流(Control):
摇杆 + 头追数据 -> 地面ESP32 -> 云服务器 -> 机载ESP32 -> 飞控。
下行视频流(Video):
摄像头 -> 手机APP -> 云服务器 -> 地面 PC 屏幕。
下行体感流(Motion Feedback - 新增):
源头: 飞控 IMU (融合解算后的 Roll/Pitch/Yaw/Accel)。
路径: 飞控 -> (Mavlink协议) -> 机载ESP32 -> (UDP封装) -> 手机热点 -> 云服务器 -> 地面 PC。
终端: 地面 PC 运行 Python 脚本接收 UDP -> 转发给 SimTools 软件 -> 驱动六轴平台。
2.3 双链路冗余控制逻辑
ArduPilot 飞控本身支持多路输入逻辑,无需额外的硬件切换开关:
优先级: 4G 信号 (
RC_CHANNELS_OVERRIDE) 优先级高于 2.4G 信号。故障切换: 若 4G 信号中断超过 1秒,飞控自动切回 2.4G 接收机控制。
3. 硬件选型与改装要点
3.1 天空端硬件
计算核心: 骁龙835/845 旧手机主板(去屏去电池,独立供电)。
视觉: UVC 广角摄像头 + 两轴舵机云台。
数据桥接: 机载 ESP32。
关键点: 它不仅负责接收地面指令,现在还需要负责高频读取飞控姿态。
连接: ESP32 Tx/Rx <-> PIX
TELEM2接口。
3.2 地面端硬件
六轴平台 (6-DOF Platform):
包含 6个电动缸(或舵机)和运动控制卡。
推荐软件:SimTools 或 FlyPT Mover(这两款软件支持从网络端口读取数据驱动电机)。
PC 地面站: 性能需足以同时运行 SRT 解码(看视频)和 SimTools(动感驱动)。
4. 软件环境与体感反馈配置(新增)
4.1 机载端 ESP32 固件逻辑升级
机载 ESP32 需要执行双向高频任务,建议使用 FreeRTOS 多线程编写:
线程 A (接收控制): 监听云服务器 UDP 端口,收到
{ch1..ch8}包后,封装为 MavlinkRC_OVERRIDE发给飞控。线程 B (发送姿态):
以 20Hz - 50Hz 的频率向飞控请求
ATTITUDE(消息ID #30) 和HIGH_LATENCY2消息。解析出
roll,pitch,yaw(弧度转角度) 以及rollspeed,pitchspeed(用于模拟瞬态震动)。封装为轻量级 UDP 包(例如 CSV 格式:
$ATT,roll,pitch,yaw,acc_z)发送回云服务器。
4.2 飞控参数设置 (Mission Planner)
串口设置:
SERIAL2_PROTOCOL= 2 (Mavlink 2)SERIAL2_BAUD= 921 (921600 bps - 必须高波特率以支持高频姿态回传)SR2_EXTRA1= 50 (设置姿态数据ATTITUDE的刷新率为 50Hz,保证座舱顺滑)
控制参数:
FS_GCS_ENABLE= 1,RC_OVERRIDE_TIME= 1.0
4.3 地面端:SimTools 衔接
动感座椅通常使用 SimTools 软件驱动。我们需要编写一个简单的“中间件”脚本(Python):
Python 脚本:
监听云服务器转发下来的 UDP 姿态包。
解析出 Roll, Pitch, Yaw。
将数据通过 NET 接口 或 虚拟串口 转发给 SimTools。
数据格式示例: SimTools 通常接受
<Axis1><Axis2>...格式,例如R12.5P-5.2Y30.1。
SimTools 设置:
Interface: Network / Serial。
Axis Assignment: 将收到的 Roll 映射到座舱的 Roll 轴,Pitch 映射到 Pitch 轴。
Smoothing (平滑处理): 4G 网络会有抖动,必须在 SimTools 里开启过滤器(Filter),否则座舱会抽搐。
5. 实施步骤
桌面验证(数据链路):
ESP32 连接飞控,电脑端用 Python 写个脚本打印接收到的 UDP 数据。
晃动飞控,确认电脑屏幕上的 Roll/Pitch 数值实时变化,延迟应 < 100ms。
动感联调:
打开 SimTools,连接 Python 中间件。
晃动飞控,确认六轴平台随动。
调试重点: 调整比例系数,飞控倾斜 10度,座舱倾斜多少?建议 1:0.8 比例,避免晕车。
整机集成与试飞:
按照之前的步骤完成手机、摄像头、头追的安装。
先进行视距内飞行,地面人员坐在座舱里体验(注意系好安全带,防止数据错误导致座舱剧烈甩动)。
6. 风险评估与体感优化
7. 硬件采购清单 (BOM)
为方便实施,以下是完成整个系统(含双链路、头追、六轴反馈)所需的所有硬件清单。